Nishanth Rajkumar
My Portfolio
Industry 4.0 | Mechatronics | ROS | Control Systems
I, Nishanth, am pursuing my Thesis-based Masters at Concordia University working on research titled "Design and Control of Autonomous Robot for Terrain Exploration". My research interests are Product Development, Developing Control Systems with Mathematical Models that involve Kinematics and Dynamics, Design optimizations, Design of machines and mechanisms, Manufacturing and Assembly, and Lean Manufacturing. I am aiming to become an entrepreneur in the field of Manufacturing and assembly in robotics. I would like to have some interesting conversations with people who endeavor to achieve in the above-mentioned fields.
I have extensive CAD modelling experience in a variety of software packages such as Catia, SolidWorks, and Fusion 360. I have gained extensive proficiency in simulation tools such as Matlab and MSc Adams for predicting various behaviours of a model with respect to its environment. In the subject of computation in mechatronic models and other structural models, I've worked on a number of projects of both academic research and industrial nature.
My skills and capabilities led to a few excellent opportunities such as industrial collaborations and research internships being bestowed on me. Two research internships had been performed at industries in India, and a further one is to be undergone at the University of Alberta, sponsored by Mitacs. I had also completed an in-plant training programme focused on mechatronics. All the aforementioned opportunities that I had experienced in my career have broadened my interests in the fields of Mechatronics.
Core Skillsets:
- Advanced Manufacturing & Prototyping
- Mastery of Perception & Control Systems
- Product Development Specialist
- Embedded Systems Engineering
Education
Concordia University - Quebec, Canada

Vellore Institute of Technology - Chennai, India

Maharishi International Residential Sriperumbudur, India

Skillset
Tools and Libraries
![ros]()
![sw]()
![fusion]()
![sofa]()
![sofa]()
![sofa]()
![tensorflow]()
![git]()
![pcl]()
![Ansys]()
![sofa]()
![gazebo]()
![sofa]()
![sofa]()
Programming Languages
![python]()
![c++]()
![C]()

















Experience
Concordia University and Polytechnique Montreal Canada
- Research Work: Development of a Fully Autonomous Mobile Robot for Domestic Lawn Weed Retrieval using ROS framework
- Emerging researcher in mobile robotics through NSERC CREATE SMART-ART Program with a passion for delivering impactful research to advance the field.
- Supervised by Dr. Wen-Fang Xie and Dr. Abolfazl Mohebbi
- Presentations

Combat Vehicles R&D Establishment, DRDO, Ministry of Defense Chennai
- Designed a mechanical and a mathematical model for a robotic arm that follows a set of sequential operations to retrieve a jammed ammunition from a machine gun
- Supervised by Dr.Babu, Scientist F, DRDO, Chennai
- Thesis Report

UNIVERSITY OF ALBERTA Canada
- Brain Controlled Robot for differently-abled and elderly to enhance Neural Thinking - Developed drone technology using specialized mathematical models to aid in the rehabilitation of patients with special abilities
- Supervised by Prof. Kim Adams director of Assistive Technology Lab, University of Alberta.
- Award Letter


PROFESSIONAL INSPECTION CONSULTANCY, ASME AUTHORIZED Chennai, India
- Good hands on work experience and involves in Finite Element Analysis (FEA) as per ASME section VIII Div. Part 5 (Numerical analysis) of pressure vessel for Plastic collapse (Plastic Elastic analysis) and FE analysis for API 653 above ground storage tank including wind and seismic analysis.
- Supervised by Dr.Davidson Jebaseelan, Associate Professor of VIT University
- Few publications have been done with the company's guidance can be found here.


VISHAY PRECISION GROUP Chennai, India
- Undertook various tasks which include designing and machining components in a multi-national company based on resistive foil technology sensors.
- Gained a deep knowledge on hands-on machining experience and programming different types of CNC’s
- Report | Certificate

Atom Robotics Chennai, India
- An Intelligent Robotics and Satellite exploration team consisting of 50+ aspiring young minds.
- The team focuses on Intelligent ground vehicles targeting IGVC, USA; Planetary Aerial System using VTOLS targeting IPAS, Mars society South Asia (MSSA); Satellites targeting Can-Sat, USA.
- Won more than 20 awards to date.
- Report | Team Website

Publications and Patents
IPO, Office of the Controller General of Patents Designs and Trademarks
- Project Report
- This project has provided a comprehensive documentation of a specialised 7-DOF robotic arm system, right from the conceptualization and design up to simulation and analysis of its motion in the scope of kinematics and dynamics.
- The system has been completely modelled towards performing the multitude of operations in sequence, as entailed by the safe retrieval process of ammunition from a heavy machine gun.
- It is postulated that this project presents a viable solution towards the problem statement posed by the Ministry of Defence, India.
- A patent for this robotic arm system has been drafted under the guidance of CVRDE scientists, and is currently put up for approval.
- Supervised by Dr. Babu, Scientist F, CVRDE, Defence Research and Development Organisation
IRMAS 2021 INTERNATIONAL CONFERENCE
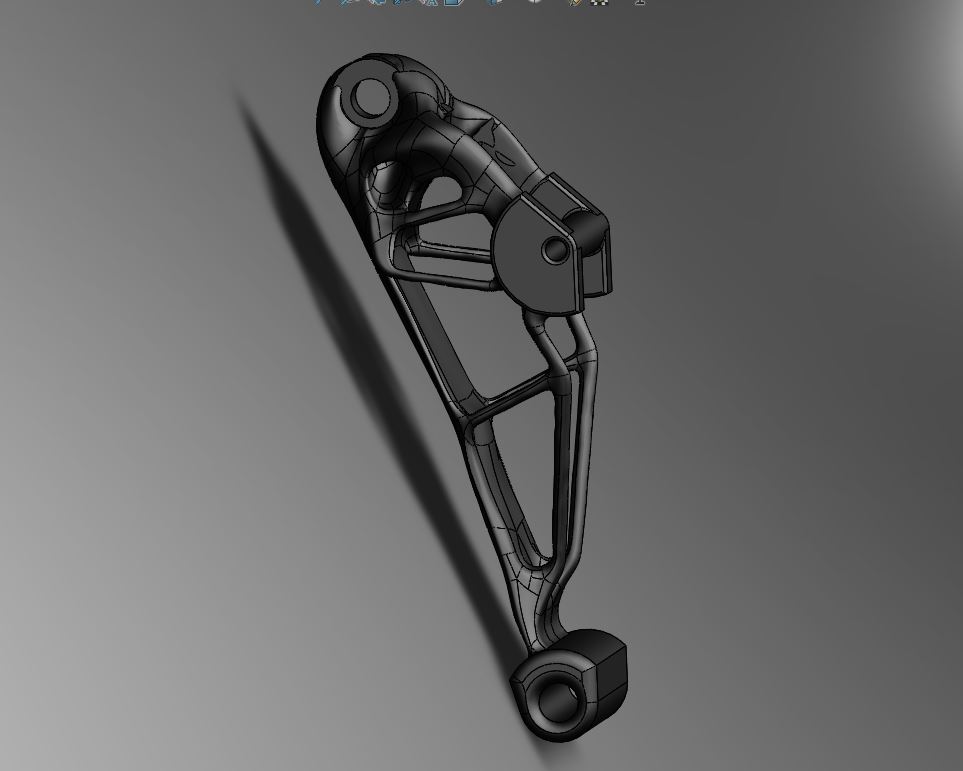
- The research accentuates to explore designing the connecting rod using Generative design tools.
- A Connecting rod is designed using Autodesk generative design embedded in Fusion 360.
- The simulation results such as static stress-strain and displacement results of additive manufactured connecting rod are compared with a conventional BAJAJ 110cc connecting rod.
- The generative designed frame has minimum displacement compared to traditional designed connecting rod.
- Supervised by Dr. Radha R, Professor, VIT Chennai
SESBT 2021 INTERNATIONAL CONFERENCE
- A finite element modelling of a storage tank is done with uniform settlement condition and its governing hoop stress at shell plate is studied under different loading conditions.
- The overall the simulation results are carried out using different seismic conditions that provides level of confidence for user or owner construct tanks in various regions of India and predict the safety of the model.
ELSEVIER JOURNAL OF PRESSURE VESSELS AND PIPING
- This study was conducted with the finite element analysis on a tank with construction code IS2062 Gr B.
- Evaluation of the structural integrity of thin walled storage tank with anchored base subjected to seismic ground excitation and different planar settlement conditions considering different plate thickness due to corrosion.
- Supervised by Dr. Davidson Jebaseelan, Professor, VIT Chennai
PRIME 2021 INTERNATIONAL CONFERENCE ON PROGRESSIVE RESEARCH IN INDUSTRIAL & MECHANICAL ENGINEERING
- This paper focus on the biodiesel obtained from processing a certain species of plant known as Madhuca Indica (Mahua). This species is widely found growing in parts of India and has immense prosperity towards our goal of a cleaner environment.
- This research work aims to provide adequate information on Mahua bio-fuel to researchers, engineers, and policymakers to induce the idea of using Mahua as an alternative fuel.
ELSEVIER Journal of Computational Materials Science
- The structural stability of a set of gears consisting of sun, planet, and ring gears was evaluated using finite element analysis on a composite planetary gear set utilised in the Tesla model.
- The composite planetary gear system showed better results as compared to the gears made of structural steel.
ELSEVIER Journal of Measurement
- In this paper, a Briggs and Stratton Model 19 Engine (7.5HP) with the maximum speed of up to 3800 rpm coupled with the gear train assembly via a continuously variable transmission (CVT) is used and a few failure conditions have been taken into account.
- A GUI model is trained and built with reasonable accuracy by analyzing its vibration characteristics, thereby predicting various types of gearbox failure to avoid collapse.
- Using a piezoelectric transducer and a data collecting system, raw signals in the form of vibrations are collected from a gearbox test setup.
Professional Projects

Mapping the Terrain: Weed Removal Robot with Hector Mapping
- Hector Mapping is a popular Simultaneous Localization and Mapping (SLAM) algorithm used in mobile robotics
- I have gained an understanding of how Hector Mapping utilizes log-likelihood estimation and scan matching methods to accurately estimate the robot's pose and create a map of the environment.



Design and Optimization of a Prosthetic Lower Limb with Kinematic Analysis
- Obtained an optimized design and stability analysis of a prosthetic lower limb consisting of four different parts: socket, a 4-bar optimized prosthetic knee, pylon, and foot for weight reduction and performance enhancement.


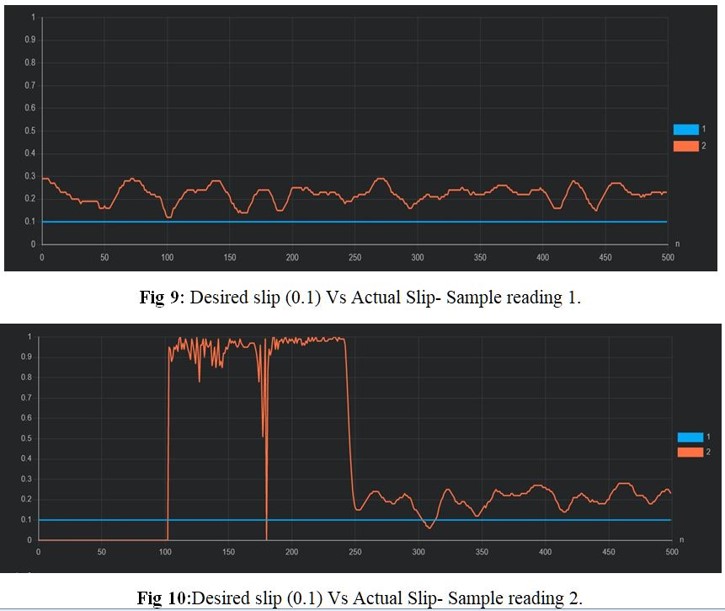


Optimized Control Architecture for a High-Performance Robotic Car Prototype
- Developed a prototype model of a four-wheeled robotic car with Ackermann steering mechanism, implementing optimized control algorithms using register-level programming.
- Designed and integrated advanced functionalities such as launch control, speed control, traction control, braking control, and line following control, resulting in superior performance and efficient program execution.


Robotic Duel: Computer Vision-Based Target Tracking and Laser Attack System
- Engineered a mobile robot with computer vision-based target tracking capabilities, utilizing a mounted camera and colored circle markers, enabling precise positioning and successful laser-based attacks on opponent robots

Design and Simulation of a Robotic Arm System for Safe Retrieval of Ammunition from Jammed Machine Gun
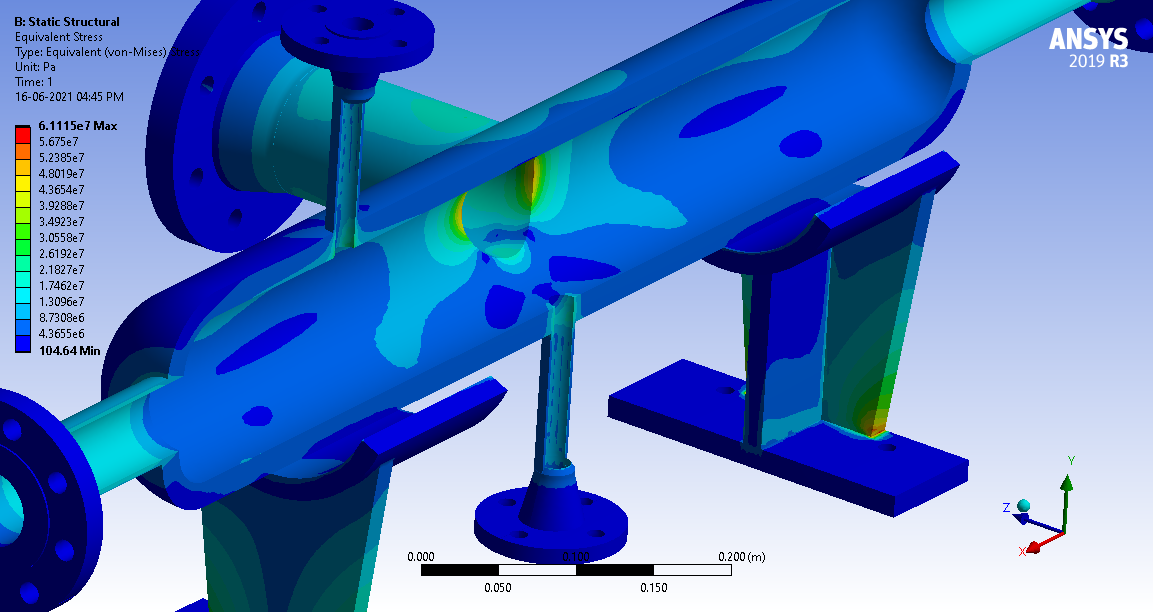
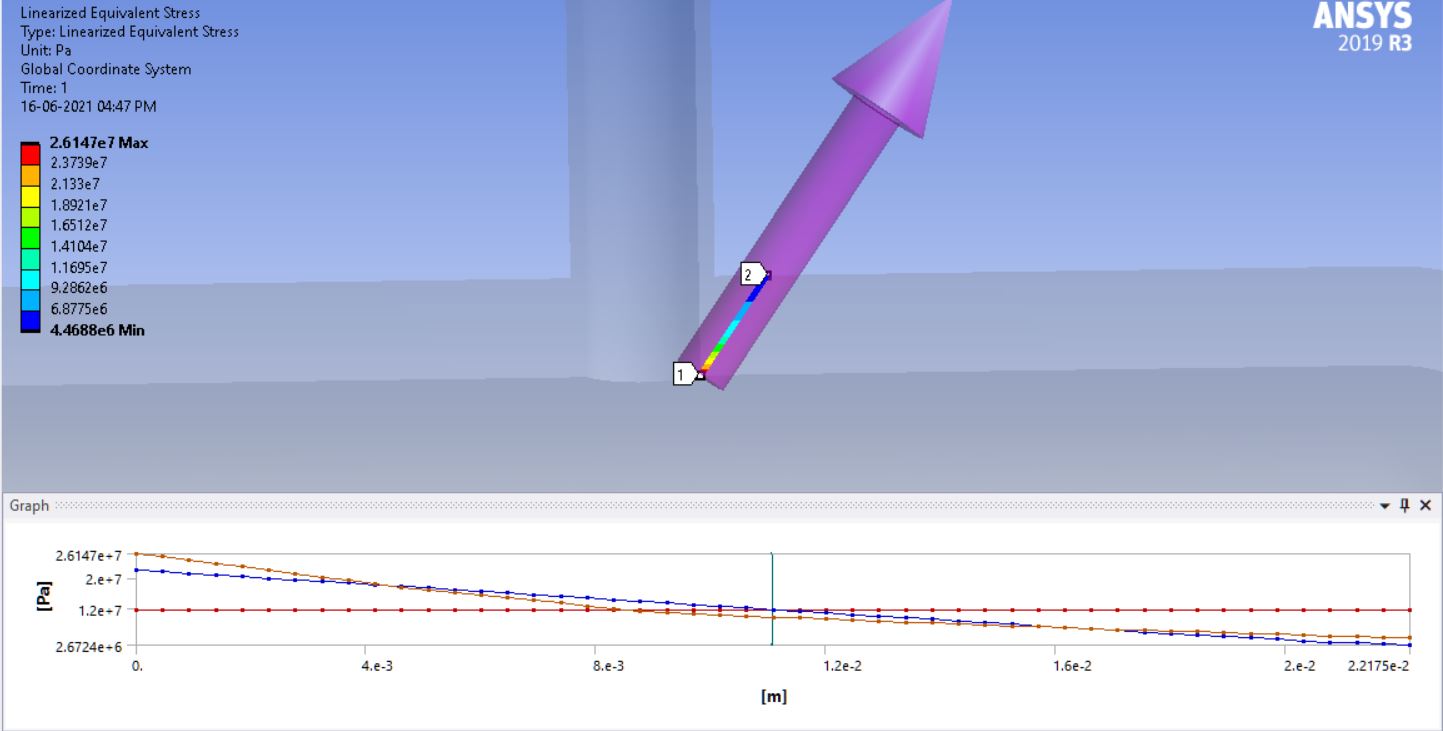
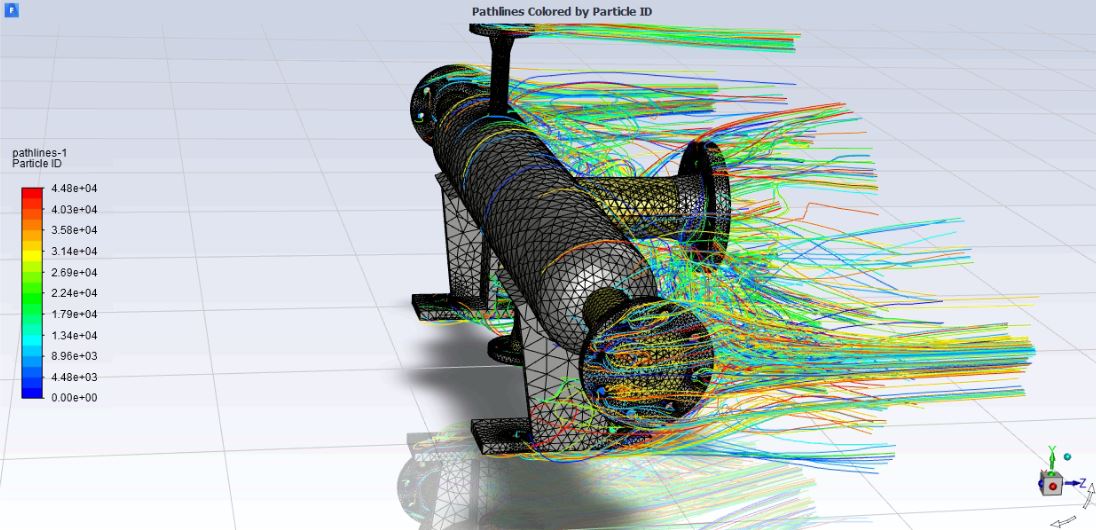
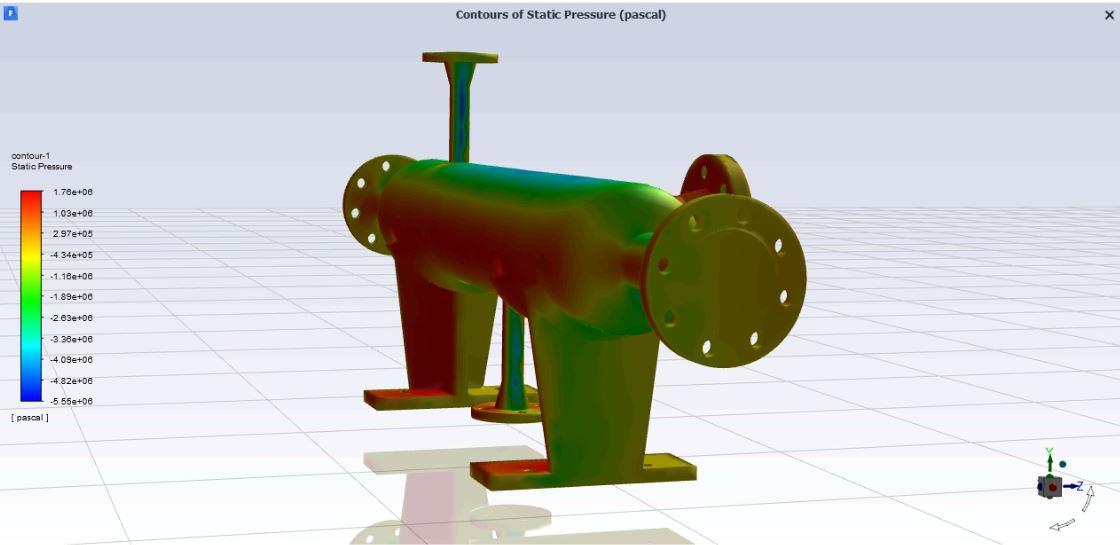
Stress Linearization of a Pressure Vessel and CFD Study due to External Wind Conditions
- A pressure vessel with different nozzles and flanges was designed according to their NPS (North American set of standard sizes for pipes).
- The pressure vessel was designed with a fixed and a sliding saddle. Different bending moments on the inside and outside of the supports were analyzed that occur due to the internal pressure and wind pressure with a speed of 45 m/s.


Design and Analysis of Single Clutch Plate
- Different parts of a single clutch plate such as the pilot bearing, clutch plate, pressure plate, clutch shaft, and helical springs were designed and assembled.
- This assembly was analyzed for different stresses, and a suitable material was chosen to minimize the stresses across the clutch plate.


Computational Fluid Dynamic study of OMEGA VTOL UAV – ATOM ROBOTICS
- An autonomous aerial planetary system designed for logistics and reconnaissance missions in the Mars environment by my team.
- Completely designed and tested from scratch considering the compatibility for flight in a Martian environment.
- A CFD study was done in order to find the critical or stalling angle of attack with the structural study to check the maximum stresses across different regions of the frame.


Ablution Assist for Elderly and Disabled
- Designed an advanced manual Rollator for elderly and disabled people, equipped with ArmRests and Cutouts, which will help them in their morning ablutions.
- The rollator can be pushed onto a lavatory, and the water supply can be connected through a hose in the given slot under the seat.
- Nozzles are added according to nozzle pipe size grades in order to supply a low-pressure water flow to high-pressure flow.
PERSONAL PROJECTS
RC Drone with aerial mapping
Robust Chest X-Ray Detection architecture
Autonomous Stair Climbing Robot for delivery of packages
Competition-Based Robots
USHRIS: A Subaquatic Hybrid Inspection and Visual Reconstruction System
Awards
Click here to have a look into some of my other awards.


